|
|
|
||||||||||||||||||||







|
|||||||||||||||||||










 물품구매안내")









 톡톡
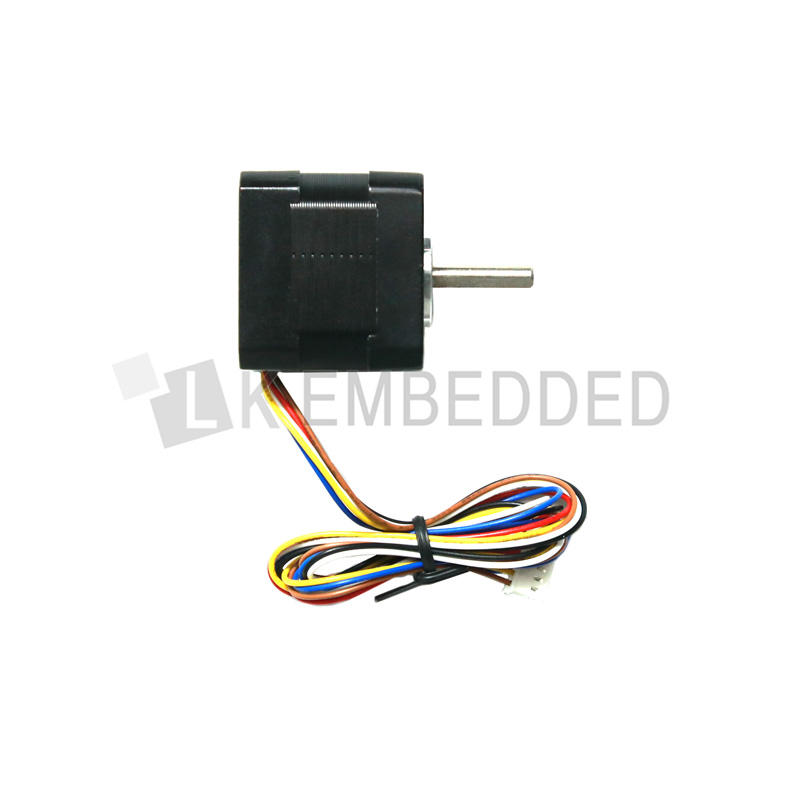
톡톡- 4상 유니폴라형 스테핑모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.
-
4상 유니폴라형 스테핑모터
아이콘 설명보기
상품번호 : 16551
![[로봇사이언스몰]4상 유니폴라형 스테핑모터>>4상 유니폴라형 스테핑모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.](/data/goods/5/2021/03/_temp_16147528543042view.png)

- 4상 유니폴라형 스테핑모터






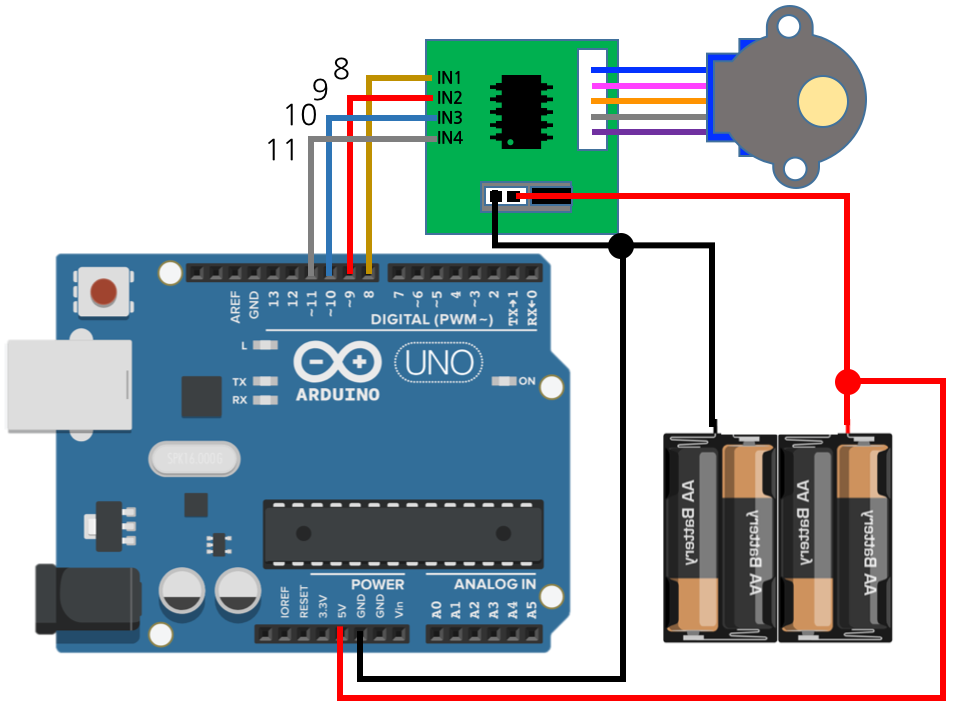

| 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 | // Rotate CW then CCW #include <Stepper.h> #define Steps_one_Revolution 32 #define GSR 32 * 64 // 64 is gear ratio, GSR=2048 Stepper stepper(Steps_one_Revolution, 8, 10, 9, 11); // to Motor Driver In1, In2, In3, In4 void setup() { // Stepper library takes care of pinModes } void loop() { stepper.setSpeed(350); stepper.step(GSR/2); delay(2000); stepper.setSpeed(350); stepper.step(-GSR/2); delay(2000); stepper.setSpeed(700); stepper.step(GSR); // CW direction delay(2000); stepper.setSpeed(700); stepper.step(-GSR); // CCW direction delay(2000); } | cs |

(1)사용방법
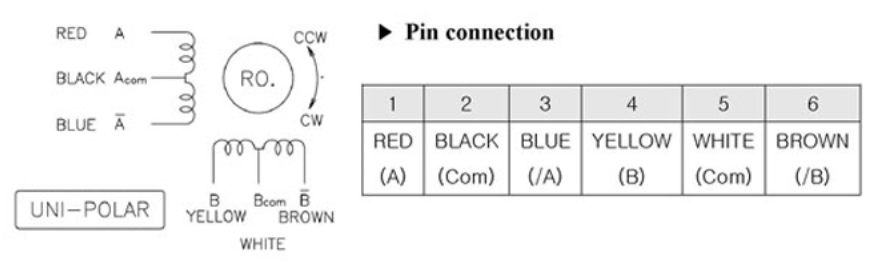
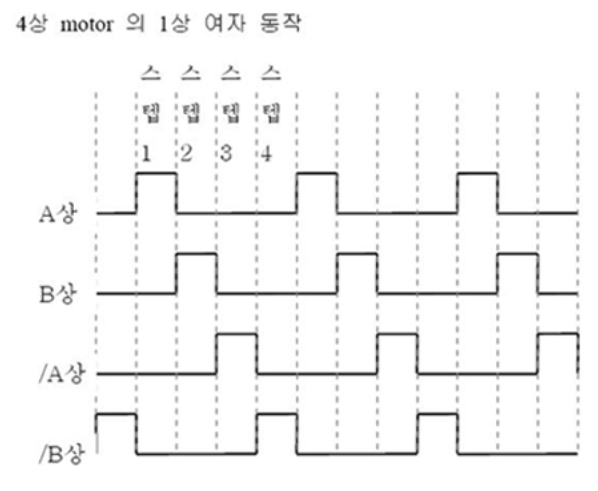
- 4상 Motor의 1상 여자 동작
아래 그림은 1상 여자방식의 Motor의 동작 신호를 나타내며, 모터는 각 STEP당 90도씩 진행 시켜 회전시킬 수 있습니다.
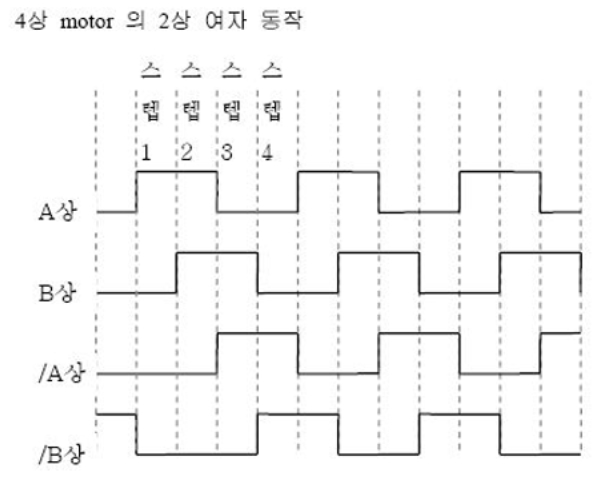
- 4상 Motor의 2상 여자 동작
아래 그림은 2상 여자방식의 Motor의 동작 신호를 나타내며, 모터는 각 STEP당 90도씩 진행 시켜 회전시킬 수 있습니다.
차이점은 토크를 좋게 하기 위해 2개의 코일을 동시에 동작시킨다는 것입니다.
1상 여자에 비하면 전류가 많이 흐르는 단점이 있지만, 정지상의 오버슈터나 언더슈터가 작고 과도 특성이 좋아집니다.
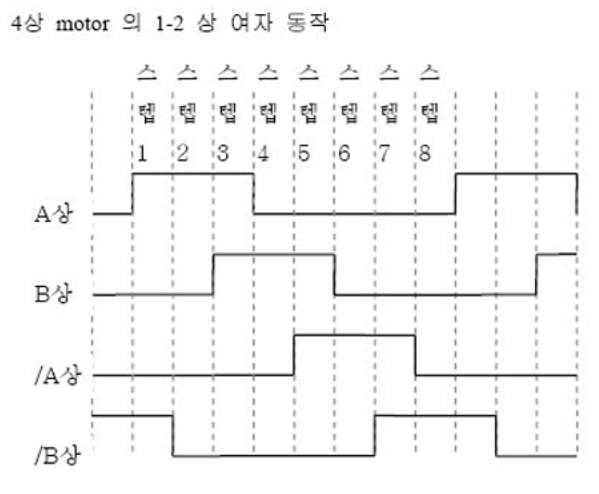
- 4상 Motor의 1-2상 여자 동작
아래의 그림은 한 STEP 마다 45도 씩 회전한다. 1-2상 여자가 앞에서 나온 구동 방법중에서 가장 성능이 좋다.
단점은 다른 여자방식과 같은 속도를 내려면 마이크로 컨트롤러에서 클럭을 2배로 만들어야 한다.
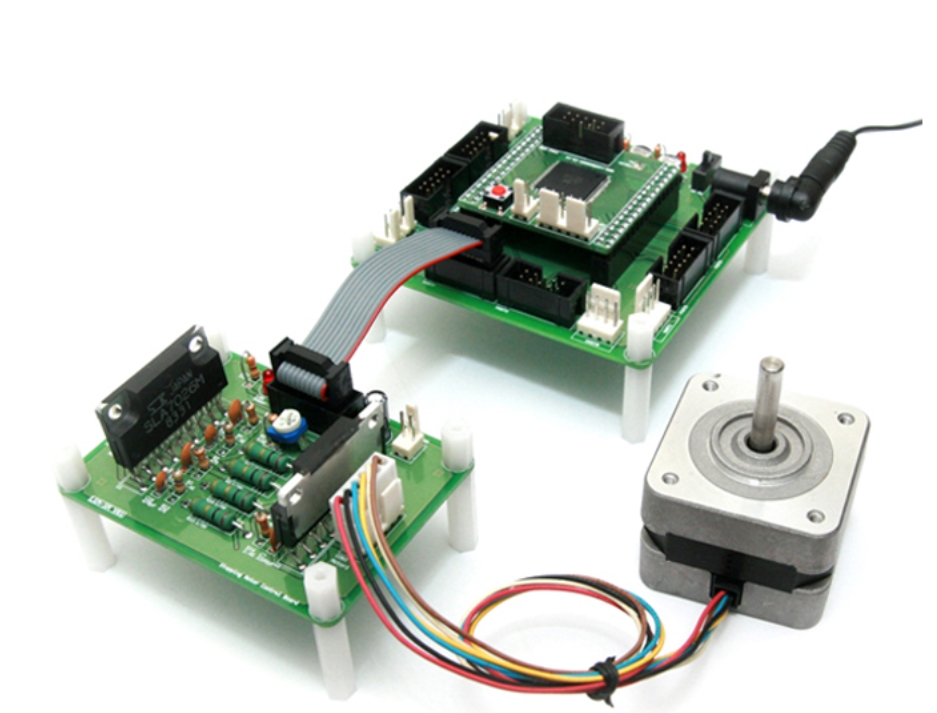
(2) AVR개발용보드 및 스테핑 드라이버보드와 연결된 모습

관련상품
-





- 라즈베리파이 고급 키트
- 다양한 입출력-센서-디스플레이-통신-인터페이스 모듈 및 기타 액세서리로 구성된 울티메이트 라즈베리파이 키트
- 판매가 ₩ 99,000
-
 2,078
2,078
-
- 조건부 무료배송
-
![[로봇사이언스몰] 메이커스: 어른의 과학 Vol.06 이공계 연구소 보드게임](/data/goods/1/2022/10/20106_temp_16655616023677view.png)
- [로봇사이언스몰] 메이커스: 어른의 과학 Vol.06 이공계 연구소 보드게임
- 이과생 마음 두근거리게 하는, 과학자가 만든 과학자 되어보기 보드게임
- 판매가 ₩ 78,000
-
1,548
-
- 조건부 무료배송
-
![[로봇사이언스몰][코딩로봇] 알파 미니 (ALPHA MINI)](/data/goods/1/2020/06/15334_tmp_32a415fdf174c952317188293d01b0684901view.jpg)
- [로봇사이언스몰][코딩로봇] 알파 미니 (ALPHA MINI)
- 로봇을 활용한 재미있는 코딩학습
- 판매가 ₩ 1,250,000
-
9,999+
-
- 조건부 무료배송
-

- 아두이노 우노 R3 고급 키트
- 아두이노 실습을 위한 필수 부품이 포함된 키트, 아두이노 코딩 배우기 교재가 제외된 상품입니다.
- 판매가 ₩ 65,340
-
6,896
-
- 조건부 무료배송
판매자 관련상품
-
- 라즈베리파이 고급 키트
- 다양한 입출력-센서-디스플레이-통신-인터페이스 모듈 및 기타 액세서리로 구성된 울티메이트 라즈베리파이 키트
- 판매가 ₩ 99,000
-
2,078
-
- 조건부 무료배송
-
- 아두이노 우노 R3 고급 키트
- 아두이노 실습을 위한 필수 부품이 포함된 키트, 아두이노 코딩 배우기 교재가 제외된 상품입니다.
- 판매가 ₩ 65,340
-
6,896
-
- 조건부 무료배송
-

- 아두이노 우노 R3 초보자 키트 스텝 1
- 아두이노 실습을 위한 필수 부품이 포함된 키트, 특히 아두이노 코딩 배우기 교재를 따로 구매 하실 수 있는 제품입니다.
- 판매가 ₩ 24,200
-
9,129
-
- 조건부 무료배송
-

- 아두이노 메가 2560 고급 키트
- 아두이노 우노 R3보다 많은 입출력포트 확보가 가능하여 다양한 확장모듈 연동이 가능한 키트로 번거로운 케이블 연결을 최소화한 전문엔지니어를 위한 메가2560기반 아두이노 고급 키트
- 판매가 ₩ 132,000
-
9,999+
-
- 조건부 무료배송
판매자 정보
| 판매자 | (주)엘케이임베디드 | 셀러등급 | 일반 |
|---|---|---|---|
| 상호명 | (주)엘케이임베디드 | 대표자 | 이경남 |
| 사업자등록번호 | 209-81-60939 | 통신판매신고번호 | 제2016-서울노원-0934호 |
| 연락처 | 02-968-8617 / member1_lklab@lkembedded.co.kr | 사업장 소재지 | 서울특별시 노원구 동일로 986 (노원 프레미어스 엠코) 102동215호 |
1. 주문하신 물품의 총 결제금액이 15만원 이상 (환율의 변동에 따라 다를 수 있음) 이면 과부가세가 발생합니다. 관부가세는 고객님께서 부담하시는 금액으로 문자를 통해 입금내역이 발송되며 해당 관세사로 입금하시면 통관처리됩니다.
2. 해외구매 특성상 주문에서 배송까지는 평균 10~15일이 소요됩니다. 간혹 현지 제품 수급에 따라 부득이하게 시일이 더 소요 될 수 있으니 구매시 좀 더 여유있게 주문하시길 권합니다.
3. 해외 내수품인 관계로 A/S에 대해서는 별도의 책임을 지지 않습니다.
4. 해외배송 특성상 주문접수후 배송상태가 배송준비중으로 넘어간 경우 해외에서 국내로의 배송이 이루어지고 있다는 뜻입니다. 따라서 배송준비중으로 배송상태가 넘어간 경우 취소및 반품이 불가하므로 이점 양해 부탁드립니다.
5. 타 해외구매대행 사이트에서 주문하신 물건과 주문날짜가 겹치지않도록 주의해 주십시오. 통관날짜가 같을 경우 합산관세가 부가되게 됩니다.
2. 해외구매 특성상 주문에서 배송까지는 평균 10~15일이 소요됩니다. 간혹 현지 제품 수급에 따라 부득이하게 시일이 더 소요 될 수 있으니 구매시 좀 더 여유있게 주문하시길 권합니다.
3. 해외 내수품인 관계로 A/S에 대해서는 별도의 책임을 지지 않습니다.
4. 해외배송 특성상 주문접수후 배송상태가 배송준비중으로 넘어간 경우 해외에서 국내로의 배송이 이루어지고 있다는 뜻입니다. 따라서 배송준비중으로 배송상태가 넘어간 경우 취소및 반품이 불가하므로 이점 양해 부탁드립니다.
5. 타 해외구매대행 사이트에서 주문하신 물건과 주문날짜가 겹치지않도록 주의해 주십시오. 통관날짜가 같을 경우 합산관세가 부가되게 됩니다.




















