|
|
|
||||||||||||||||||||







|
|||||||||||||||||||










 물품구매안내")









 톡톡
톡톡- 타워프로(TowerPro) MG995 서보모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.
-
아두이노 서보모터 MG995
아이콘 설명보기
상품번호 : 16562
![[로봇사이언스몰]아두이노 서보모터 MG995>>타워프로(TowerPro) MG995 서보모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.](/data/goods/5/2024/01/16562_temp_17065136341038view.png)
![[로봇사이언스몰]아두이노 서보모터 MG995>>타워프로(TowerPro) MG995 서보모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.](/data/goods/5/2024/01/16562_temp_17065136355921view.png)
![[로봇사이언스몰]아두이노 서보모터 MG995>>타워프로(TowerPro) MG995 서보모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.](/data/goods/5/2024/01/16562_temp_17065136356662view.png)
![[로봇사이언스몰]아두이노 서보모터 MG995>>타워프로(TowerPro) MG995 서보모터는 아두이노 우노 R3, 아두이노 메가 2560, AVR, PIC, ARM, FPGA와 호환 가능한 개발 모듈입니다.](/data/goods/5/2024/01/16562_temp_17065136367282view.png)







- 아두이노 서보모터 MG995

- MG995는 많은 아두이노 프로젝트 및 로봇 제어에 사용되는 서보모터 중 하나이다.
- 이 모터는 비교적 높은 토크와 다양한 응용 분야에서 사용할 수 있는 기능을 제공한다.





- 높은 토크:
MG995는4kg/cm (4.8v), 11kg/cm (6v) 토크 값을 가지고 있어서 상대적으로 무거운 하중을 들어낼 수 있다.
토크는 종류에 따라 다르지만, 일반적으로 10 kg-cm에서 15 kg-cm 정도의 범위를 가진다.
- 무게(Weight):
55g
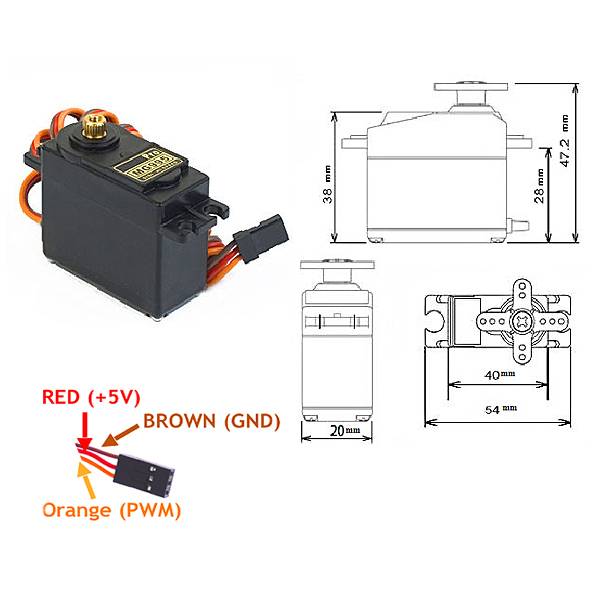
- 치수(Dimension):
7×19.7×42.9mm
- 회전 범위:
일반적으로 MG995는 0도에서 180도까지의 회전을 지원한다.
- 내구성:
고품질의 내구성 있는 소재로 만들어다.
- 긴 수명:
적절한 사용과 유지보수를 통해 긴 수명을 제공한다.
- 제어:
아두이노 보드 및 다른 마이크로컨트롤러를 통해 쉽게 제어할 수 있다.
- 3핀 커넥터:
전원 (VCC), 그라운드 (GND), 제어 신호 (SIGNAL)를 연결하는 데 사용되는 3개의 핀이 있다.



- 아두이노 서보모터 MG995가 아두이노에서 구동하는 간단한 예제 코드는 다음과 같다.
- 이 코드는 Servo 라이브러리를 사용하여 서보모터를 제어한다.
- 이 예제는 서보모터를 0도에서 180도까지 10도 간격으로 왕복하게 만든다.
|
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
|
#include <Servo.h>
Servo myServo; // Servo 객체 생성
int angle = 0; // 서보모터 각도 변수
void setup() {
myServo.attach(9); // 서보모터 신호 핀을 아두이노 9번 핀에 연결
}
void loop() {
for (angle = 0; angle <= 180; angle += 10) { // 0도에서 180도까지 10도 간격으로 회전
myServo.write(angle); // 서보모터 각도 설정
delay(500); // 0.5초 대기
}
delay(1000); // 1초 대기
for (angle = 180; angle >= 0; angle -= 10) { // 180도에서 0도까지 10도 간격으로 회전
myServo.write(angle); // 서보모터 각도 설정
delay(500); // 0.5초 대기
}
delay(1000); // 1초 대기
}
|
cs |

- 치수

- 아두이노 서보모터 MG995 * 1pcs

관련상품
-





- 라즈베리파이 고급 키트
- 다양한 입출력-센서-디스플레이-통신-인터페이스 모듈 및 기타 액세서리로 구성된 울티메이트 라즈베리파이 키트
- 판매가 ₩ 99,000
-
 1,942
1,942
-
- 조건부 무료배송
-
![[로봇사이언스몰][코딩로봇] 알파 미니 (ALPHA MINI)](/data/goods/1/2020/06/15334_tmp_32a415fdf174c952317188293d01b0684901view.jpg)
- [로봇사이언스몰][코딩로봇] 알파 미니 (ALPHA MINI)
- 로봇을 활용한 재미있는 코딩학습
- 판매가 ₩ 1,250,000
-
9,999+
-
- 조건부 무료배송
-
![[로봇사이언스몰] 메이커스: 어른의 과학 Vol.06 이공계 연구소 보드게임](/data/goods/1/2022/10/20106_temp_16655616023677view.png)
- [로봇사이언스몰] 메이커스: 어른의 과학 Vol.06 이공계 연구소 보드게임
- 이과생 마음 두근거리게 하는, 과학자가 만든 과학자 되어보기 보드게임
- 판매가 ₩ 78,000
-
1,477
-
- 조건부 무료배송
-

- 아두이노 우노 R3 초보자 키트 스텝 1
- 아두이노 실습을 위한 필수 부품이 포함된 키트, 특히 아두이노 코딩 배우기 교재를 따로 구매 하실 수 있는 제품입니다.
- 판매가 ₩ 24,200
-
8,977
-
- 조건부 무료배송
판매자 관련상품
-
- 라즈베리파이 고급 키트
- 다양한 입출력-센서-디스플레이-통신-인터페이스 모듈 및 기타 액세서리로 구성된 울티메이트 라즈베리파이 키트
- 판매가 ₩ 99,000
-
1,942
-
- 조건부 무료배송
-
- 아두이노 우노 R3 초보자 키트 스텝 1
- 아두이노 실습을 위한 필수 부품이 포함된 키트, 특히 아두이노 코딩 배우기 교재를 따로 구매 하실 수 있는 제품입니다.
- 판매가 ₩ 24,200
-
8,977
-
- 조건부 무료배송
-

- 아두이노 우노 R3 고급 키트
- 아두이노 실습을 위한 필수 부품이 포함된 키트, 아두이노 코딩 배우기 교재가 제외된 상품입니다.
- 판매가 ₩ 65,340
-
6,728
-
- 조건부 무료배송
-

- 아두이노 메가 2560 고급 키트
- 아두이노 우노 R3보다 많은 입출력포트 확보가 가능하여 다양한 확장모듈 연동이 가능한 키트로 번거로운 케이블 연결을 최소화한 전문엔지니어를 위한 메가2560기반 아두이노 고급 키트
- 판매가 ₩ 132,000
-
9,999+
-
- 조건부 무료배송
판매자 정보
| 판매자 | (주)엘케이임베디드 | 셀러등급 | 일반 |
|---|---|---|---|
| 상호명 | (주)엘케이임베디드 | 대표자 | 이경남 |
| 사업자등록번호 | 209-81-60939 | 통신판매신고번호 | 제2016-서울노원-0934호 |
| 연락처 | 02-968-8617 / member1_lklab@lkembedded.co.kr | 사업장 소재지 | 서울특별시 노원구 동일로 986 (노원 프레미어스 엠코) 102동215호 |
1. 주문하신 물품의 총 결제금액이 15만원 이상 (환율의 변동에 따라 다를 수 있음) 이면 과부가세가 발생합니다. 관부가세는 고객님께서 부담하시는 금액으로 문자를 통해 입금내역이 발송되며 해당 관세사로 입금하시면 통관처리됩니다.
2. 해외구매 특성상 주문에서 배송까지는 평균 10~15일이 소요됩니다. 간혹 현지 제품 수급에 따라 부득이하게 시일이 더 소요 될 수 있으니 구매시 좀 더 여유있게 주문하시길 권합니다.
3. 해외 내수품인 관계로 A/S에 대해서는 별도의 책임을 지지 않습니다.
4. 해외배송 특성상 주문접수후 배송상태가 배송준비중으로 넘어간 경우 해외에서 국내로의 배송이 이루어지고 있다는 뜻입니다. 따라서 배송준비중으로 배송상태가 넘어간 경우 취소및 반품이 불가하므로 이점 양해 부탁드립니다.
5. 타 해외구매대행 사이트에서 주문하신 물건과 주문날짜가 겹치지않도록 주의해 주십시오. 통관날짜가 같을 경우 합산관세가 부가되게 됩니다.
2. 해외구매 특성상 주문에서 배송까지는 평균 10~15일이 소요됩니다. 간혹 현지 제품 수급에 따라 부득이하게 시일이 더 소요 될 수 있으니 구매시 좀 더 여유있게 주문하시길 권합니다.
3. 해외 내수품인 관계로 A/S에 대해서는 별도의 책임을 지지 않습니다.
4. 해외배송 특성상 주문접수후 배송상태가 배송준비중으로 넘어간 경우 해외에서 국내로의 배송이 이루어지고 있다는 뜻입니다. 따라서 배송준비중으로 배송상태가 넘어간 경우 취소및 반품이 불가하므로 이점 양해 부탁드립니다.
5. 타 해외구매대행 사이트에서 주문하신 물건과 주문날짜가 겹치지않도록 주의해 주십시오. 통관날짜가 같을 경우 합산관세가 부가되게 됩니다.




















